 Lin and Yu, 2025.
Lin and Yu, 2025.Robot humanoid kemungkinan akan segera mampu menaklukkan jalur terjal sebaik manusia, berkat penelitian terbaru dari Universitas Michigan.
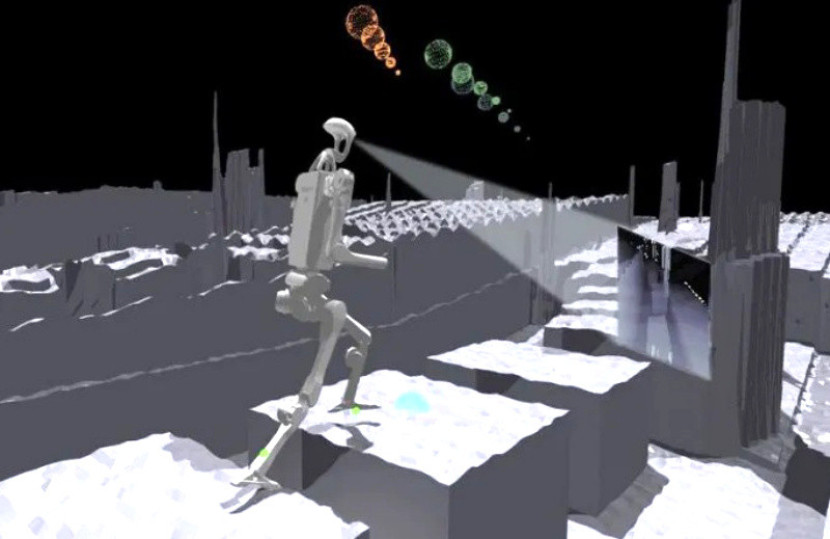
Sebuah tim di sana telah mengembangkan sistem kecerdasan buatan (AI) yang melatih robot humanoid simulasi untuk mendaki melintasi medan yang tidak rata dan penuh rintangan tanpa memerlukan operator manusia untuk memandu setiap langkah.
Sistem baru ini disebut LEGO-H, dan memberi robot kemampuan untuk merencanakan ke depan, menjaga keseimbangan, menghindari bahaya, dan menyesuaikan langkah mereka saat permukaan tanah berubah.
Alih-alih hanya berjalan lurus, robot dapat melompat, melangkahi bebatuan, melewati ruang sempit, atau bahkan pulih dari tersandung—keterampilan yang dapat menjadi krusial untuk operasi pencarian dan penyelamatan, pemantauan ekologi di daerah terpencil, dan misi lain di mana akses manusia sulit atau berbahaya.
“Sampai saat ini, sebagian besar robot humanoid hampir buta, mengandalkan manusia untuk membuat keputusan pergerakan mereka,” kata Stella Yu, penulis senior studi tersebut.
“Model kami adalah yang pertama yang memungkinkan robot humanoid melihat, memutuskan, dan bergerak sepenuhnya sendiri.”
Untuk menguji LEGO-H, para peneliti menggunakan robot simulasi yang dirancang oleh Unitree Robotics.
Robot virtual ini hadir dalam dua ukuran—dewasa dengan tinggi sekitar 1,8 meter dan versi yang lebih kecil, seukuran anak-anak.
Masing-masing dilengkapi dengan kamera untuk penglihatan, petunjuk arah GPS dasar, dan indra kesadaran tubuh.
Alih-alih mengikuti instruksi langkah demi langkah, robot-robot tersebut hanya diberi tahu arah tujuan, misalnya "0,3 mil timur laut," dan harus mencari cara terbaik untuk sampai ke sana.
Robot virtual berlatih di lima jenis jalur yang berbeda, masing-masing dengan berbagai tingkat kesulitan.
Performa mereka dinilai berdasarkan seberapa aman, efisien, dan tuntas mereka dapat mencapai tujuan.
Anehnya, jika dibandingkan dengan robot yang diberi peta sempurna dan data lingkungan yang lengkap, para pendaki otonom seringkali berkinerja sama baiknya—atau bahkan lebih baik—terutama dalam hal keselamatan. Kesadaran bawaan mereka terhadap gerakan tubuh sendiri berperan besar dalam mencegah jatuh dan cedera.
Seiring pelatihan, robot-robot ini mengembangkan strategi alami yang tidak pernah diprogram oleh manusia. Misalnya, mereka mencondongkan tubuh ke samping agar dapat melewati tempat sempit, melewati rintangan besar, atau melangkahi rintangan kecil. Yang paling mengagumkan, mereka mampu menyeimbangkan diri kembali setelah tersandung—sesuatu yang tidak dapat dilakukan robot humanoid sebelumnya.
Sejauh ini, eksperimen hanya melatih kaki robot. Para peneliti menjaga tubuh bagian atas mereka tetap diam karena menambahkan gerakan lengan akan membuat masalahnya jauh lebih rumit. Namun, setelah sistem yang berfokus pada kaki ini berhasil, tim berencana untuk mengembangkannya menjadi pendakian seluruh tubuh untuk meningkatkan stabilitas dan keamanan lebih jauh lagi.
Tujuan utamanya adalah untuk menerapkan pelajaran dari jalur virtual ini ke dunia nyata, menempatkan robot humanoid di medan terjal yang sesungguhnya.
Jika berhasil, robot-robot ini dapat segera mendaki bersama kita—bukan sebagai pendamping, tetapi sebagai penolong di beberapa lingkungan terberat di Bumi.